-
-12 31
數(shù)控沖床伺服控制概念的提法很多,其實概念的提法并不重要。為滿足某種目的,產(chǎn)生運動和對物體運動進行控制是我們?nèi)祟愖钪匾幕顒又弧K^伺服控制指對物體運動的有效控制,即對物體運動的速度、位置、加速度進行控制。這種控制正在變得隨處可見和越來越普遍。
數(shù)控沖床伺服控制的方式分類:
(1)開環(huán)控制系統(tǒng)
開環(huán)控制系統(tǒng)是指不帶反饋的控制系統(tǒng).
其特點:開環(huán)控制具有結(jié)構(gòu)簡單、系統(tǒng)穩(wěn)定、容易調(diào)試、成本低等優(yōu)點。但是系統(tǒng)對移動部件的誤差沒有補償和校正,所以精度低。一般適用于經(jīng)濟型數(shù)控機床和舊機床數(shù)控化改造。
如圖1-6,部件的移動速度和位移量是由輸入脈沖的頻率和脈沖數(shù)決定的。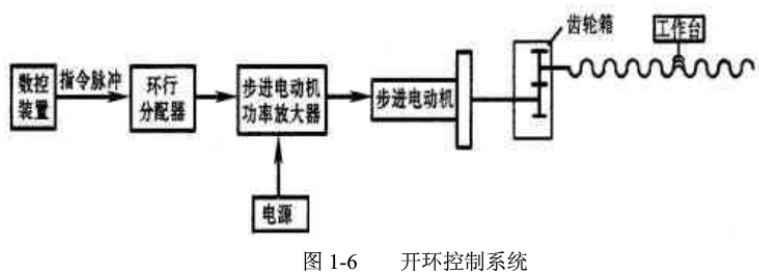
(2)半閉環(huán)控制系統(tǒng)
a、半閉環(huán)控制系統(tǒng)是在開環(huán)系統(tǒng)的絲杠上裝有角位移測量裝置,通過檢測絲杠的轉(zhuǎn)角間接地檢測移動部件的位移,反饋到數(shù)控系統(tǒng)中,由于慣性較大的數(shù)控沖床移動部件件包括在檢測范圍之內(nèi),因而稱作半閉環(huán)控制系統(tǒng),如圖1-7所示。
b、系統(tǒng)閉環(huán)環(huán)路內(nèi)不包括機械傳動環(huán)節(jié),可獲得穩(wěn)定的控制特性。機械傳動環(huán)節(jié)的誤差,可用補償?shù)霓k法消除,可獲得滿意的精度。中檔數(shù)控數(shù)控沖床廣泛采用半閉環(huán)數(shù)控系統(tǒng)。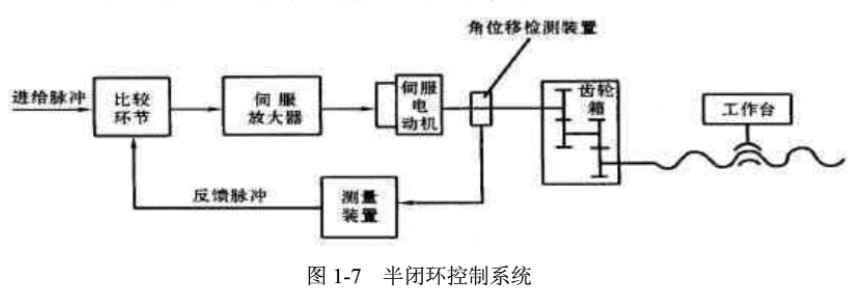
(3)閉環(huán)控制系統(tǒng)
a、在數(shù)控轉(zhuǎn)塔沖床移動部件上直接裝有位置檢測裝置,將測量的結(jié)果直接反饋到數(shù)控裝置中,與輸入指令進行比較控制,使移動部件按照實際的要求運動,最終實現(xiàn)精確定位,原理如下圖所示,因為把機床工作臺納入了位置控制環(huán),故稱為閉環(huán)控制系統(tǒng)。
b、該系統(tǒng)定位精度高、調(diào)節(jié)速度快。該系統(tǒng)調(diào)試工作困難。系統(tǒng)復(fù)雜并且成本高,故適用于精度要求很高的數(shù)控機床,如精密數(shù)控鏜銑床、超精密數(shù)控數(shù)控轉(zhuǎn)塔沖床等。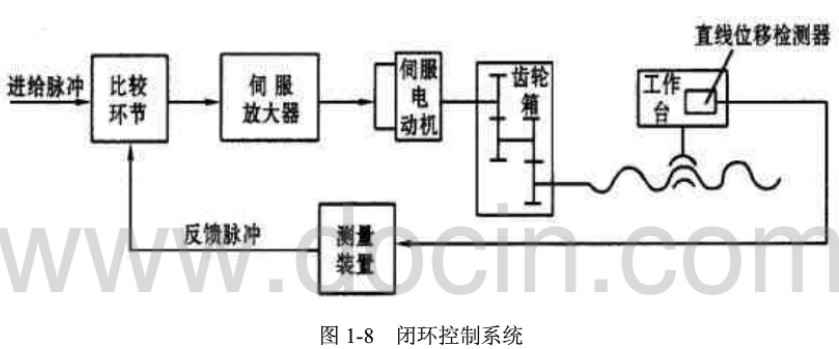
◎歡迎參與討論,請在這里發(fā)表您的看法、交流您的觀點。
- 評論(0)
發(fā)表評論 TrackBack