╗žģó┐╝³c(di©Żn)ŅÉ(l©©i)╣╩šŽį\öÓ║═ŠSą▐
░l(f©Ī)▓╝š▀Ż║ū┐¢|ÖC(j©®)ąĄ ░l(f©Ī)▓╝Ģr(sh©¬)ķgŻ║2012/4/28 9:15:44
1ĪóĘĄ╗žÖC(j©®)┤▓ģó┐╝³c(di©Żn)Ą─ā╔ĘNĘĮĘ©
░┤öĄ(sh©┤)┐žø_┤▓Öz£y(c©©)į¬╝■Öz£y(c©©)įŁ³c(di©Żn)ą┼╠¢(h©żo)ĘĮ╩ĮĄ─▓╗═¼Ż¼ĘĄ╗žÖC(j©®)┤▓ģó┐╝³c(di©Żn)Ą─ĘĮĘ©ėąā╔ĘNŻ¼╝┤¢┼ĄĻĘ©║═┤┼ķ_(k©Īi)ĻP(gu©Īn)Ę©ĪŻį┌¢┼³c(di©Żn)Ę©ųąŻ¼Öz£y(c©©)Ų„ļSų°ļŖäė(d©░ng)ÖC(j©®)ę╗▐D(zhu©Żn)ą┼╠¢(h©żo)═¼Ģr(sh©¬)«a(ch©Żn)╔·ę╗éĆ(g©©)¢┼³c(di©Żn)╗“ę╗éĆ(g©©)┴Ń╬╗├}ø_į┌ÖC(j©®)ąĄ▒Š¾w╔Ž░▓čbę╗éĆ(g©©)£p╦┘õN(xi©Īo)ēK╝░ę╗éĆ(g©©)£p╦┘ķ_(k©Īi)ĻP(gu©Īn)Ż¼«ö(d©Īng)£pš┌ō§ęįē║Ž┬£p╦┘ķ_(k©Īi)ĻP(gu©Īn)Ģr(sh©¬)Ż¼╦┼Ę■ļŖäė(d©░ng)ÖC(j©®)£p╦┘ĄĮĮėĮ³įŁ³c(di©Żn)╦┘Č╚▀\(y©┤n)ąąŻ¼«ö(d©Īng)£p╦┘ō§ēKļxķ_(k©Īi)£p╦┘ķ_(k©Īi)ĻP(gu©Īn)Ģr(sh©¬)Ż¼╝┤ßīĘ┼ķ_(k©Īi)ĻP(gu©Īn)║¾Ż¼öĄ(sh©┤)┐žŽĄĮy(t©»ng)Öz£y(c©©)ĄĮĄ─Ą┌ę╗éĆ(g©©)¢┼³c(di©Żn)╬╗ą┼╠¢(h©żo)╝┤×ķįŁ³c(di©Żn)ĪŻį┌┤┼ķ_(k©Īi)ĻP(gu©Īn)Ę©ųąŻ¼į┌ÖC(j©®)ąĄ▒Š¾w╔Ž░▓čb┤┼ĶF╝░┤┼Ėąæ¬(y©®ng)įŁ³c(di©Żn)ķ_(k©Īi)ĻP(gu©Īn)╗“š▀ĮėĮ³ķ_(k©Īi)ĻP(gu©Īn)Ż¼«ö(d©Īng)┤┼Ėąæ¬(y©®ng)ķ_(k©Īi)ĻP(gu©Īn)╗“ĮėĮ³ķ_(k©Īi)ĻP(gu©Īn)Öz£y(c©©)ĄĮįŁ³c(di©Żn)ą┼╠¢(h©żo)║¾Ż¼╦┼░µļŖäė(d©░ng)ÖC(j©®)┴ó╝┤═Żų╣▀\(y©┤n)ąąŻ¼įō═Żų╣³c(di©Żn)▒╗šJ(r©©n)╣╩įŁ³c(di©Żn)ĪŻ
¢┼³c(di©Żn)Ę©Ą─╠ž³c(di©Żn)╩Ū╚ń│▓ĮėĮ³įŁ³c(di©Żn)╦┘Č╚ąĪė┌─│ę╗╠žČ©ųĄŻ¼ätĮ╗┴„╦┼Ę■ļŖäė(d©░ng)ÖC(j©®)┐é╩Ū═Żų╣ė┌═¼ę╗³c(di©Żn)ĪŻę▓Š═╩Ūšf(shu©Ł)Ż¼į┌▀M(j©¼n)ąą╗žįŁ³c(di©Żn)▓┘ū„║¾Ż¼ÖC(j©®)┤▓įŁ³c(di©Żn)Ą─▒Ż│ųąį║├Ż¼┤┼ķ_(k©Īi)ĻP(gu©Īn)Ę©Ą─╠ž³c(di©Żn)╩Ū▄ø╝■╝░ė▓╝■║å(ji©Żn)å╬Ż¼Ą½įŁ³c(di©Żn)╬╗ų├ļSų°╦┼Ę■ļŖäė(d©░ng)ÖC(j©®)╦┘Č╚Ą─ūā╗»Č°│╔▒╚└²Ąž╔ŅęŲŻ¼╝┤įŁ³c(di©Żn)▓╗┤_Č©ĪŻ─┐Ū░Ż¼┤¾ČÓöĄ(sh©┤)ÖC(j©®)┤▓▓╔ė├¢┼³c(di©Żn)Ę©ĪŻ
2ĪóĘĄ╗žģóÕ¾³c(di©Żn)Ą─ĘĮ╩Į
ĘĄ╗žģó┐╝³c(di©Żn)Ą─ĘĮ╩Įę╗░Ń┐╔ęįĘų×ķ╚ńŽ┬ÄūĘNĪŻ
(1)╩ųäė(d©░ng)╗žįŁ³c(di©Żn)Ģr(sh©¬).╗žįŁ³c(di©Żn)▌SŽ╚ęįģóöĄ(sh©┤)įO(sh©©)ų├Ą─┐ņ╦┘ęŲäė(d©░ng)╦┘Č╚Ž“įŁ³c(di©Żn)ĘĮŽ“ęŲäė(d©░ng);«ö(d©Īng)£p╦┘ō§ēKē║Ž┬įŁ³c(di©Żn)£p╦┘ķ_(k©Īi)ĻP(gu©Īn)ųŌŻ¼╗žįŁ³c(di©Żn)▌S£p╦┘ĄĮŽĄĮy(t©»ng)ģóöĄ(sh©┤)įO(sh©©)ų├Ą─▌^┬²ģó┐╝³c(di©Żn)Č©╬╗╦┘Č╚Ż¼└^ĮŚŽ“Ū░ęŲäė(d©░ng)«ö(d©Īng)£p╦┘ķ_(k©Īi)ĻP(gu©Īn)▒╗ßīĘ┼║¾Ż¼öĄ(sh©┤)┐žŽĄĮy(t©»ng)ķ_(k©Īi)╩╝Öz£y(c©©)ŠÄ┤a┐Ó┐ÓĄ─¢┼³c(di©Żn)╗“┴Ń├}ø_«ö(d©Īng)ŽĄĮy(t©»ng)Öz£y(c©©)ĄĮĄ┌ę╗éĆ(g©©)¢┼³c(di©Żn)╗“├}ø_║¾Ż¼ļŖäė(d©░ng)ÖC(j©®)±R╔Ž═Żų╣▐D(zhu©Żn)äė(d©░ng)Ż¼«ö(d©Īng)Ū░╬╗ų├╝┤×ķÖC(j©®)┤▓┴Ń³c(di©Żn)ĪŻ
(2)╗žįŁ³c(di©Żn)▌SŽ╚ęįģóöĄ(sh©┤)įO(sh©©)ų├Ą─┐ņ╦┘ęŲäė(d©░ng)Ą─╦┘Č╚Ž“įŁ³c(di©Żn)ĘĮŽ“ęŲäė(d©░ng)Ż¼«ö(d©Īng)£p╦┘ō§ēKē║Ž┬įŁ³c(di©Żn)£p╦┘ķ_(k©Īi)ĻP(gu©Īn)Ģr(sh©¬)Ż¼╗ž┴Ń▌S£p╦┘ĄĮŽĄĮy(t©»ng)ģóöĄ(sh©┤)įO(sh©©)ų├ĪŻ▌^┐ĪĄ─ģó┐╝³c(di©Żn)Č©╬╗╦┘Č╚Ż¼▌öŽ“ŽÓĘ┤ĘĮŽ“ęŲäė(d©░ng);«ö(d©Īng)£p╦┘ķ_(k©Īi)ĻP(gu©Īn)▒╗ßīĘ┼║¾ĪŻöĄ(sh©┤)┐žŽĄĮy(t©»ng)ķ_(k©Īi)╩╝Öz£y(c©©)ŠÄ┤aĖŌĄ─¢┼³c(di©Żn)╗“┴Ń├}ø_Ż¼«ö(d©Īng)ŽĄĮy(t©»ng)Öz£y(c©©)ĄĮĄ┌ę╗éĆ(g©©)¢┼³c(di©Żn)╗“┴Ń├}ø_║¾Ż¼ļŖäė(d©░ng)ÖC(j©®)±R╔Ž═Żų╣▐D(zhu©Żn)äė(d©░ng)Ż¼«ö(d©Īng)Ū░╬╗ų├æ¬(y©®ng)×ķÖC(j©®)┤▓┴Ń³c(di©Żn)ĪŻ
(3)╗žįŁ³c(di©Żn)▌SŽ╚ęįģóö┐įO(sh©©)ų├Ą─┐ņ╦┘ęŲäė(d©░ng)Ą─╦┘Č╚Ž“įŁ³c(di©Żn)ĘĮŽ“ęŲäė(d©░ng)Ż¼«ö(d©Īng)£p╦┘ō§ēKē║Ž┬įŁ³c(di©Żn)£p╦┘ķ_(k©Īi)ĻP(gu©Īn)Ģr(sh©¬)Ż¼╗ž┴Ń▌S£p╦┘ĄĮŽĄĮy(t©»ng)ģóöĄ(sh©┤)įO(sh©©)ų├▌^┬²Ą─ģó┐╝³c(di©Żn)Č©╬╗╦┘Č╚Ż¼▌SŽ“ŽÓĘ┤ĘĮŽ“ęŲäė(d©░ng)ĪŻ«ö(d©Īng)£p╦┘ķ_(k©Īi)ĻP(gu©Īn)▒╗ßīĘ┼║¾Ż¼╗ž▐D(zhu©Żn)▌Sį┘┤╬Ę┤Ž“;«ö(d©Īng)£p╦┘ķ_(k©Īi)ĻP(gu©Īn)į┘┤╬▒╗ē║Ž┬║¾ĪŻöĄ(sh©┤)┐žŽĄĮy(t©»ng)ķ_(k©Īi)╩╝Öz£y(c©©)ŠÄ┤aŲ„Ą─¢┼³c(di©Żn)╗“┴Ń├}ø_;«ö(d©Īng)ŽĄĮy(t©»ng)Öz£y(c©©)ĄĮĄ┌ę╗éĆ(g©©)¢┼³c(di©Żn)╗“┴Ń├}ø_║¾Ż¼ļŖäė(d©░ng)ÖC(j©®)±R╔Ž═Żų╣▐D(zhu©Żn)äė(d©░ng)Ż¼«ö(d©Īng)Ū░╬╗ų├╝┤×ķÖC(j©®)┤▓┴Ń³c(di©Żn)ĪŻ
(4)╗žįŁ³c(di©Żn)▌S║óĄĮ╗ž┴Ńą┼╠¢(h©żo)║¾Ż¼Š═į┌«ö(d©Īng)Ū░╬╗ų├ęįę╗éĆ(g©©)▌^┬²Ą─╦┘Č╚Ž“╣╠Č©Ą─ĘĮŽ“ęŲäė(d©░ng)Ż¼═¼Ģr(sh©¬)öĄ(sh©┤)╬╗ŽĄĮy(t©»ng)ķ_(k©Īi)╩╝Öz£y(c©©)ŠÄ┤ać╠Ą─¢┼³c(di©Żn)╗“┴Ń├}ø_ĪŻ«ö(d©Īng)ŽĄĮy(t©»ng)Öz£y(c©©)ĄĮĄ┌ę╗éĆ(g©©)¢┼³c(di©Żn)╗“┴Ń├}ø_║¾Ż¼ļŖäė(d©░ng)ÖC(j©®)±R╔Ž═Żų╣▐D(zhu©Żn)äė(d©░ng)Ż¼«ö(d©Īng)Ū░╬╗ų├╝┤×ķÖC(j©®)┤▓┴Ń³c(di©Żn)ĪŻ
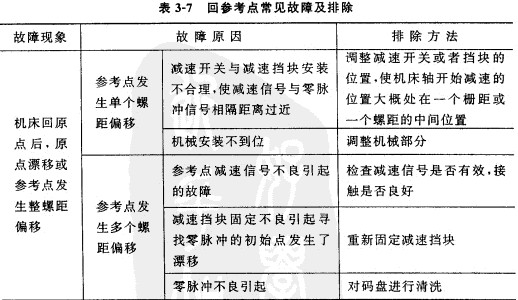
3Īó╗žģó┐╝³c(di©Żn)╣╩šŽ╝░┼┼│²
«ö(d©Īng)öĄ(sh©┤)┐žø_┤▓╗žģó┐╝³c(di©Żn)│÷¼F(xi©żn)╣╩šŽĢr(sh©¬)Ż¼Ž╚Öz▓ķįŁ³c(di©Żn)ęįš┌ō§ēK╩Ūʱ╦╔äė(d©░ng)Ż¼£p╦┘ķ_(k©Īi)ĻP(gu©Īn)╣╠Č©╩Ūʱ└╬╣╠į┌╗“▒╗ōpē─Ż¼ė├░┘ĘųęŃ╗“╝ż╣ŌĖ╔╔µāx▀M(j©¼n)ąą£y(c©©)┴┐Ż¼┤_Č©ÖC(j©®)ąĄŽÓī”(du©¼)╬╗ų├╩ŪʱŲ»ęŲönį┌£p╦┘ĶKēKĄ─ķL(zh©Żng)Č╚Ż¼░▓čbĄ─╬╗ų├╩Ūʱ║Ž└Ē;Öz▓ķ╗žįŁ³c(di©Żn)Ą─Ų╩╝╬╗ų├ĪóįŁ³c(di©Żn)╬╗ų├ĪŻ║═£p╦┘ķ_(k©Īi)ĻP(gu©Īn)Ą─╬╗ų├╚²š▀ų«ķgĄ─ĻP(gu©Īn)ŽĄŻ¼┤_Č©╗žįŁ³c(di©Żn)Ą──Ż╩Į╩Ūʱš²┤_;┤_Č©╗žįŁ³c(di©Żn)╦∙▓╔ė├Ą─Ę┤üį¬Ų„╝■Ą─ŅÉ(l©©i)ą═ĪŻÖz▓ķėąĻP(gu©Īn)╗žįŁ³c(di©Żn)Ą─ģóöĄ(sh©┤)įO(sh©©)ų├╩Ūʱš²┤_ĪŻ┤_šJ(r©©n)ŽĄĮy(t©»ng)╩Ū╚½ķ]Łh(hu©ón)▀Ć╩Ū░ļķ]Łh(hu©ón)Ą─┐žųŲ;ė├╩Š▓©Ųšģ╬Öz▓ķ├}ø_ŠÄ┤aŲ„╗“╣Ō¢┼│▀Ą─┴Ń³c(di©Żn)├}ø_╩Ūʱ│÷¼F(xi©żn)┴╦å¢(w©©n)Ņ}:Öz▓ķPLCŽĄĮy(t©»ng)Ą─╗ž┴ŃĖ®╠¢(h©żo)Ą─▌ö╚ļ³c(di©Żn)╩Ūʱš²┤_.
╗žģó┐╝³c(di©Żn)│ŻęŖ(ji©żn)╣╩šŽ╝░┼┼│²ęŖ(ji©żn)Ž┬▒Ē