����(sh��)�؛_���ϏV�������˼�ͣ���ƣ���Ŀ�����ھo����r�£�����̵ĕr�g��(n��i)���C(j��)�������е��\(y��n)�Ӳ����M(j��n)���ƄӲ�ֹͣ����(sh��)�؛_������ͣ������Ҫ���c�C(j��)������S���õĘ�(bi��o)��(zh��n)�Ͱ�ȫҎ(gu��)�����P(gu��n)�����ܲ����ķN���P(gu��n)�İ�ȫ��(bi��o)��(zh��n)����ͣ�r�����\(y��n)�Ӳ������������̵ĕr�g��(n��i)ֹͣ�\(y��n)�ӡ���ʹijЩ��(bi��o)��(zh��n)Ҫ���ڼ�ͣ�r���_�(q��)�������ߔ�(sh��)�؛_�����Դ��Ҳ������������\(y��n)�Ӳ���ֹͣ������Д����Դ����Щ�C(j��)������SҪ��ͣ�r�Д���(sh��)��ϵ�y(t��ng)���(q��)��ϵ�y(t��ng)�������C(j��)��늚ⲿ�����Դ����(sh��)�H�ϣ�ͨ�^��ͣ����ֱ���Д����Դ��̎�������Dz����_�ģ�һ���棬�C(j��)���ϵ��\(y��n)�Ӳ�������ֱ�Ӕ�늕��M(j��n)���ԇ��B(t��i)����(d��o)���\(y��n)�Ӳ����M(j��n)���oֹ�ĕr�g�����L����һ���棬ֱ�Ӕ�늲������ŷ��(q��)��ϵ�y(t��ng)��늕r���Ҫ���܌�(d��o)���ŷ��(q��)������Ӳ�����ϡ�
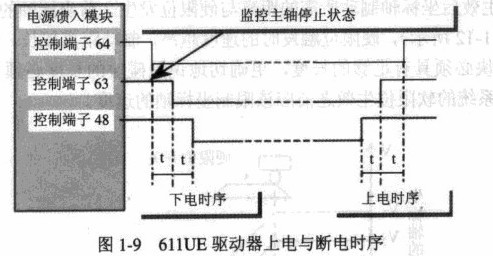
��D1-9��ʾ��611UE�ŷ��(q��)����������c��늕r��D���ĈD�п��Կ�������(sh��)��ϵ�y(t��ng)���ŷ��(q��)��ϵ�y(t��ng)������c��늕r�����Ї�(y��n)��Ҫ��ģ����ŷ��(q��)��ϵ�y(t��ng)��늺͔�늕r��IJ�ͬ�A�Σ��ŷ�ϵ�y(t��ng)�Ĺ�����B(t��i)�Dz�ͬ�ġ�����������_�ؿ��Ɣ�늕r����(d��o)���ŷ�늙C(j��)�M(j��n)�����ɠ�B(t��i)��ʹ��늙C(j��)���Ƅӕr�g���L�������_(d��)�������Ƅӵ�Ŀ�ġ���֮��������ՈD1-9���_�����˔�늕r�t���Ա��C�ŷ��(q��)���������Ƅӡ������(q��)�����ĸ���������̖(64��63��48)�����ԅ�����D1-10��ʾ����PLCϵ�y(t��ng)���ƣ�ͨ�^PLC����24V���g�^����Ġ�B(t��i)�팍(sh��)�F(xi��n) ��64��63��48���ⲿ߉ֱ�ӿ��ơ�Ҳ���ԁ�����D1-11����ʾ�ķ�ʽ�M(j��n)�п��ƣ��ڼ�ͣ���oSBI��SB2���º� 24V�^���KAI�Ŀ��ƾ�Ȧʧ늶���(d��o)���(q��)�����Ŀ��ƶ���64�Ͷ���9���_��ʹ���@�N�������H��ͣ���Ԕ��_�(q��)�����Ŀ��Ʊ��ܣ������κ�һ���M(j��n)�o�S�l(f��)��Ӳ��λ�rҲ���Ԕ��_����ʹ�ܡ�