��(sh��)�؛_����ҕ�����܈D�ξ���ϵ�y(t��ng)
�O╇�(y��n)�Թ� ��� �e��ٝ
ժҪᘌ����y(t��ng)�D�ξ���ϵ�y(t��ng)�о����c������x��ȱ�c���_�l(f��)��һ���D�ξ����c��(sh��)�ؼӹ����漯����һ�����(sh��)�؛_����ҕ������ϵ�y(t��ng)��B��ϵ�y(t��ng)�ĽM�ɽY(ji��)��(g��u)�����õ�����Ҫ���g(sh��)��(x��)��(ji��)��ҕ�����g(sh��)������ʹ�Ô�(sh��)�؈D�ξ��̸��Ӹ�Ч��ֱ�^.
�P(gu��n)�I�~��(sh��)�أ��D�ξ��̣��k�𣻛_������ҕ�����̖TP 39L 73
���y(t��ng)����(sh��)���D(zhu��n)���_���D�ξ���ϵ�y(t��ng)�˶��ԈD�ν�����ʽ���ɔ�(sh��)�س���Ȼ�����ɔ�(sh��)�ؼӹ���������M(j��n)�з��棬�D�ξ��̳����c�������ͨ�����������ģ�K���]���������F(xi��n)��Ҋ�����õĿ�ҕ���������˾���Ч�ʻ����@�N��r��ᘌ���(sh��)�؛_������MA P-1000ϵ�y(t��ng)���������_�l(f��)��һ��ҕ���D�ξ���ϵ�y(t��ng)������(sh��)��ָ��̺ʹ��a����z����һ�𣬲����ڵ����x���a���ɵȷ������F(xi��n)��һ�������ܻ�.
1 ��ҕ���D�ξ���ϵ�y(t��ng)�ĽY(ji��)��(g��u)
��ҕ���D�ξ���ϵ�y(t��ng)���ھS�L�D��ϵ�y(t��ng)����ҕ����(sh��)��ָ��ţ��ϵ�y(t��ng)����(sh��)��ָ�(y��u)��ϵ�y(t��ng)�����ֽM��
1.1 ���S�o�D��ϵ�y(t��ng)
��ҕ������ϵ�y(t��ng)�������_�l(f��)�Ķ��SCADܛ��ϵ�y(t��ng)����S�L�D����ģ�K���������L��ֱ�����A��������(���Θӗl��B�ӗl)�Ȼ�С�L�D���ܣ�������߀���Ќ��R�������c�ӑB(t��i)��(d��o)�����Ƅӡ���(f��)�ơ��R��ȸ�����ϵ�y(t��ng)��ֱ������ʼ�c����(bi��o)�ͽK�c����(bi��o)���x���A���ɈA������(bi��o)�����c����(bi��o)���K�c����(bi��o)�������(bi��o)־�����Ϣ���x��
1.2��ҕ����(sh��)��ָ������ϵ�y(t��ng)
��ҕ����(sh��)��ָ������ϵ�y(t��ng)���������x��ģ�K��ָ������ģ�K��ָ�ģ�K��
�����x��ģ�K�Ĺ����Ǐ�ϵ�y(t��ng)���ߎ����x�����m�ļӹ�����ϵ�y(t��ng)�ĵ��ߎ��Ԕ�(sh��)��(j��)�x����ʽ����ڴűP�ϣ���(sh��)��(j��)�ļ��еĵ���ӛ䛰��������Π���߳ߴ硢������͡����߾�̖�ȃ�(n��i)��ϵ�y(t��ng)��ָ��ţ���^���и���(j��)��ͬ���ߵ���͡��ߴ����Ϣ�{(di��o)�ò�ͬ��̎�������Ñ����x�ĵ�����Ϣ��ģ�B(t��i)�ģ������x�ߵą���(sh��)��Ϣһֱ�����ڃ�(n��i)����ֱ���Ñ��x����һ�ѵ��߶�������Q��ֹ��
ָ������ģ�K��������ʽ�IJ�ͬ�ɷ֞���һ���ֱ��ʰȡ���S�D�Δ�(sh��)��(j��)��Ϣ��Ȼ�����ɼӹ�ԓ�D�εĔ�(sh��)�ش��a���@��ܰ������_ָ�����]�^(q��)�_ָ��ֱ߅��A�����_���A����һ����Ñ�ֱ���Խ�����ʽָ���ӹ�λ�úͼӹ�������Ȼ��ֱ�����ɔ�(sh��)�ش��a�������@Ĺ����У���ָ���ĵ��ߛ_�ס�ָ���A�ĺͰ돽?j��ng)_���A�ס��_����еȹ��ܡ�
1. 3��(sh��)��ָ�(y��u)��ϵ�y(t��ng)
ԓϵ�y(t��ng)�܌������ɵĔ�(sh��)��ָ����������M(j��n)�������̓�(y��u)�����p�ٲ���Ҫ�ēQ���r�g���ߔ�(sh��)�س���ļӹ�Ч��
2 ��ҕ���D�ξ���ϵ�y(t��ng)���P(gu��n)�I���g(sh��)
2.1 ���SCAD�D�ε�̎��
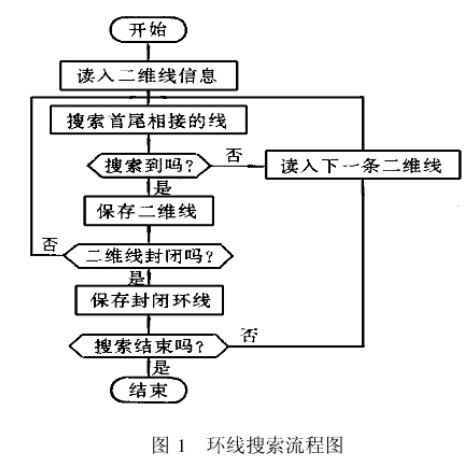
���SCAD�D���еĈD���L�Ʒ�����һ���ܱ��C���D����������β����γɷ��]�ĭh(hu��n)��������ڔ�(sh��)�ؼӹ����a���ɕr��Ҫ���D���еĭh(hu��n)�����x����������ӹ������߅�����CAD�D��̎���ĵ�һ��Ҫ���xɢ�Ķ��S�������ɰ��Ⱥ������β��ӵĭh(hu��n)����������������D1��ʾ
�����M(j��n)һ���^(q��)�e��߅��̓�(n��i)߅�磬���x��߅��h(hu��n)������rᘷ���(n��i)߅��h(hu��n)����형rᘷ��������������h(hu��n)���rֻ���]�˭h(hu��n)����β��ӣ���δ���]�h(hu��n)�������������ڭh(hu��n)��������ɺ�Ҫ���h(hu��n)���ķ������M(j��n)һ�����{(di��o)����ʹ�������߅��̓�(n��i)߅��ĭh(hu��n)���x�����ڭh(hu��n)��߅�����|(zh��)����(n��i)߅�����߅�磩���Д���ñ��^�����еķ������F(xi��n)�����h(hu��n)���ķ�����rᘻ�형rᘣ��Д����Ӌ��������e�ķ������.
2 2 �D�ξ���ϵ�y(t��ng)�Ŀ�ҕ��
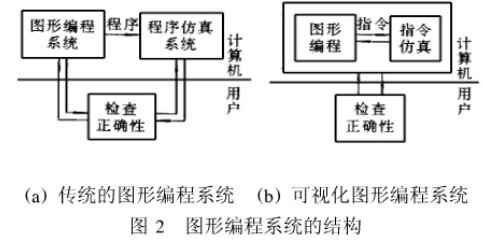
���y(t��ng)�ĈD�ξ���ϵ�y(t��ng)��ָ������ϵ�y(t��ng)���cָ�����ϵ�y(t��ng)֮�g���Q�Ĕ�(sh��)��(j��)ͨ����������(sh��)�س����乤��������D2 (a)��ʾ���@�N�����c����������С����ɽ����˾���Ч�ʱ��IJ����ˈD2(b)��ʾ�ġ����С��������̽Y(ji��)��(g��u)���D�ξ���ϵ�y(t��ng)(a)���y(t��ng)�ĈD�ξ���ϵ�y(t��ng) (b)��ҕ���D�ξ���ϵ�y(t��ng)���c�������֮�g�Ľ��Q��(sh��)��(j��)��Ηlָ��@�N�����С��Y(ji��)��(g��u)�ļ���ʹ��(sh��)��ָ���c��ҕ���D��֮�g���F(xi��n)�ˌ��r���p���P(gu��n)(li��n)���D�ε��L�ƻ�(sh��)��ָ����ĕ��քe��������(y��ng)��(sh��)��ָ����ҕ���D�εĸ�׃���Ñ����ԓ�(j��)�˼��r�l(f��)�F(xi��n)�e�`�����Ը������Ķ�����˾���Ч�ʡ�
2 3 �D�ξ���ϵ�y(t��ng)�����ܻ�
2 3 1 ��(sh��)��ָ�������^�̵����ܻ�
�ڲ�ָ���ӹ����ߵ���r�£�ϵ�y(t��ng)����һ����Ҏ(gu��)�t�Ԅӵ؏ĵ��ߎ����x����m�ĵ�������ӹ����������ڛ_���οוr���x�ߵĿ��wҎ(gu��)�t�ǣ������ڵ��ߎ��������Π�c�_��߅����ȫһ�µĵ��ߣ����ҵ��tһ�Λ_������ɼӹ�������ڵ��ߎ��Ќ����c�ӹ��Ȍ��ȵ��ߣ����ҵ��tһ�β��M(j��n)�_������ɼӹ���������С������ӽ��ڱ��ӹ��� 2/3���ȵĵ��ߞ�ӹ����ߣ�ͨ�^�ɴβ��M(j��n)�_����ɼӹ����R�e�_��߅���Π�r������ͨ�^������ȡ�����߅���Π(sh��)��(j��)�г�ȡ��������Ȼ��������ģ�K�ó��P(gu��n)��߅���Π�e�ĽY(ji��)Փ������߅���Π�e�ĽY(ji��)Փ���������Ρ��A�ס��ɶ˞��A�����L�ۡ����βۡ�耳�
�ڈD�ξ��̕r��ϵ�y(t��ng)�ܸ���(j��)������͡��ӹ��Π�������Ԅӵ؏Ĺ�ˇ��(sh��)��(j��)�����x���M(j��n)�o��ٶȵȹ�ˇ����(sh��)�ڈD�ξ����^���У�ϵ�y(t��ng)�����Єe�����^�̵ĺ����ԣ����箔(d��ng)�L�ƵĿױ����x�ĵ���߀ˣС�r��ϵ�y(t��ng)���oɽ��ʾ��
2 3 2��(sh��)�س���(y��u)���^�̵����ܻ�
���˙C(j��)�D�ν�����ʽ���ɔ�(sh��)�ش��a���^���У����ӹ��^�̵Ĵ���]���e��Ҫ���@ʹ�ñ���������һ�ѵ��ӹ���ɵĹ����ܿ��ܱ����䵽�����������ļӹ��^���У����������˲���Ҫ�ēQ���r�g��ʹ�Ô�(sh��)�ش��a�ļӹ�Ч�ʽ��ͣ���������ɵĴ��a��������(sh��)��ϵ�y(t��ng)ǰҪ�������M(j��n)�Ѓ�(y��u)���������Ԝp�ٓQ�����o���r�g
�ڈD�ν������������ɵļӹ����a�У����н^������(bi��o)ָ�Ҳ����������(bi��o)ָ��.���ڌ�����(bi��o)ָ��cָ���(zh��)�е��Ⱥ�������P(gu��n)������(sh��)��ָ��ă�(y��u)�������x�ܿ��ܕ���׃ָ��Ĉ�(zh��)�д��������ڃ�(y��u)����(sh��)�ش��aǰ����Ҫ�����a�е���������(bi��o)ָ���D(zhu��n)����ȃr�Ľ^������(bi��o)ָ����������(bi��o)ָ��Ľ^����ͨ�^ϵ�y(t��ng)����(sh��)��ָ���̓�M��(zh��)�Ќ��F(xi��n)��ָ����̓�M��(zh��)�Еr��Ӌ���ÿһ�l����ָ��ӹ�λ�õĽ^������(bi��o)��Ȼ���M(j��n)һ�����䷭�g�ɵȃr�Ľ^������(bi��o)ָ�(sh��)�س���ă�(y��u)���^�̷֞�ɲ���������ͬ�����ָ��Σ��h���؏�(f��)�ēQ��ָ��ϲ��ӹ�ָ�����ָ�(y��u)����ɺ������{(di��o)�ÿ�ҕ����ጳ����@ʾ��(y��u)�����µĵ���܉�E��_��λ�ã��ԙz�郞(y��u)���Y(ji��)�������_�ԡ�

